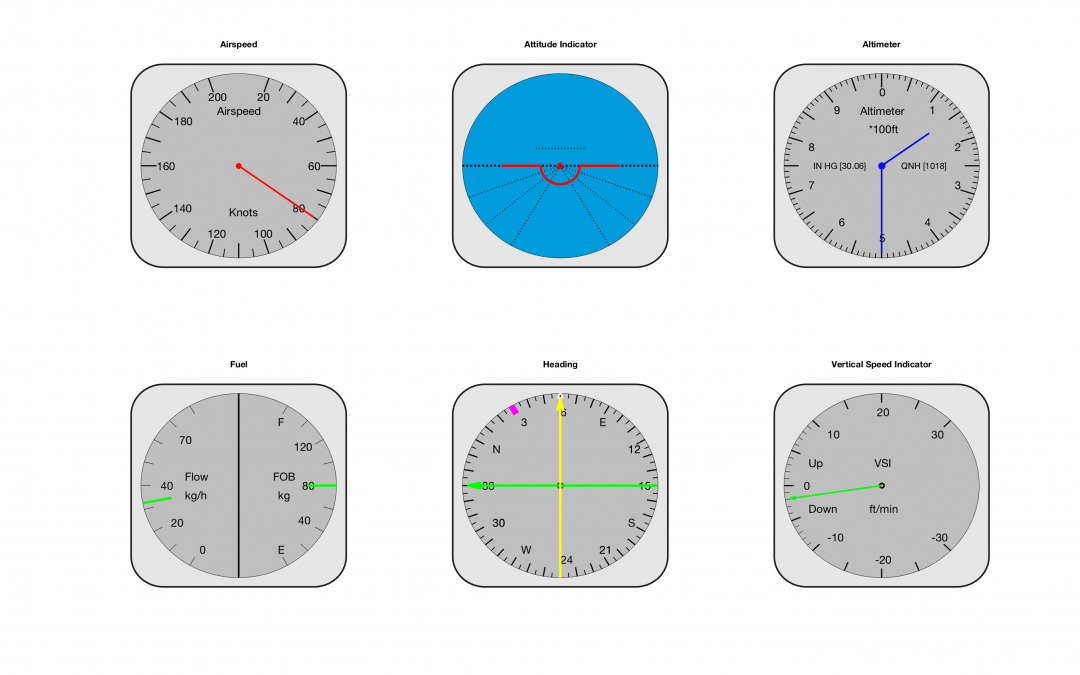
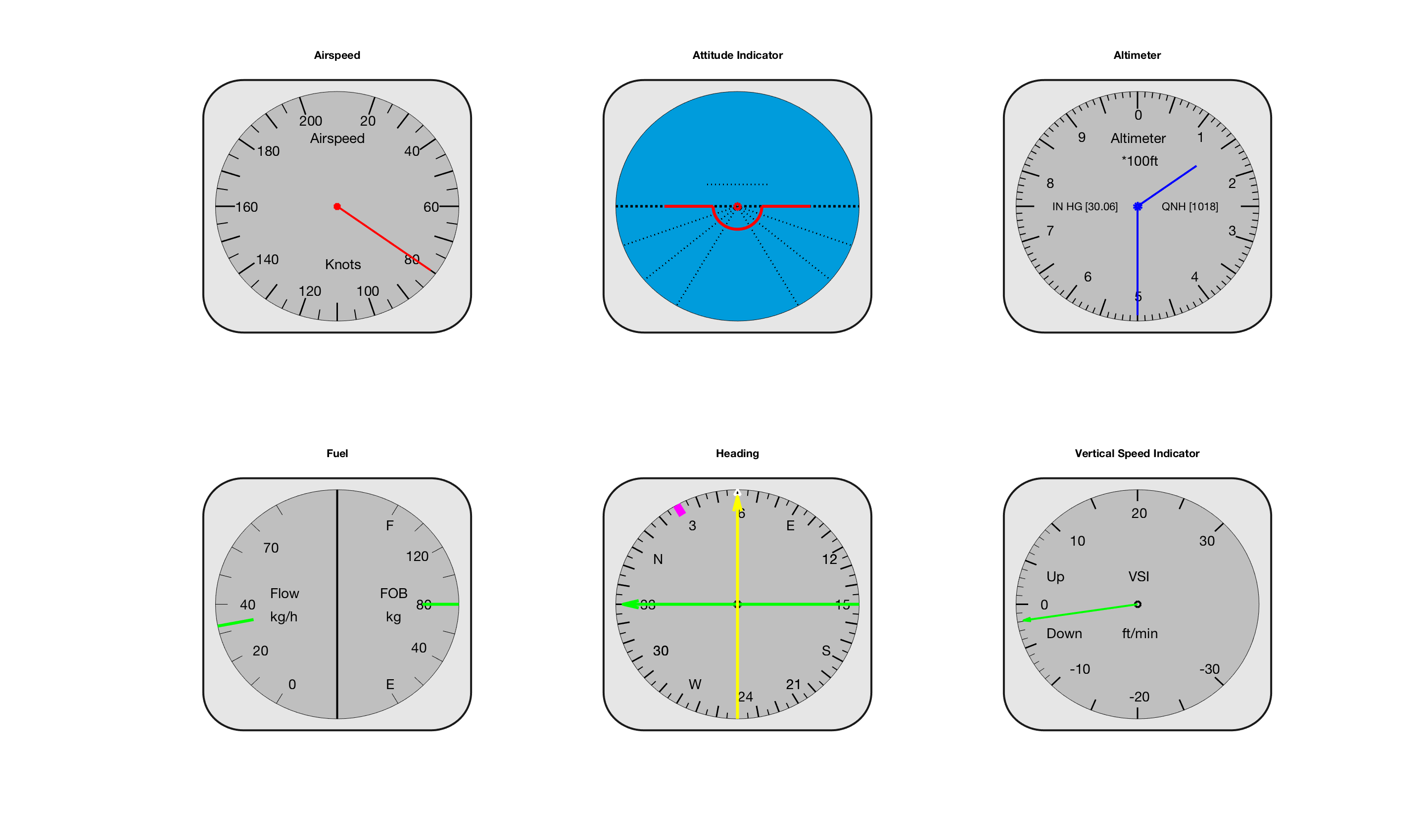
The aim of this project, which Arian Ghoddousi a member of Team Drone Tech is currently working on, was to compute and simulate aircraft flight data. The data output was designed to look like a common general aviation plane cockpit, like the Cessna C172.
During the coding process it became clear that the potential of this program is greater than just a stand-alone project. When the whole code was recoded in order to convert it from procedural programming to object orientated code, it was coded in module blocks, which can work separately and can be put together as desired, especially, the gauges and the trajectory plot. This method enables a larger spectrum of usage. The main program is designed to compute all the necessary data by itself. A different method and the next step would be the usage of sensors which gather data. Therefore, a hardware interface, like an Arduino, is needed.
The possible usage of this project for Team Drone Tech could look like this:
A drone could be equipped with different sensors, for example, for pressure and acceleration and then establish a connection to, e.g., a radio transmitter. On the ground station, a receiver is required, which needs to be connected to a microcontroller, such as the Arduino, which then will transform the data, gathered by the sensors, into concrete values. The last step is the communication between microcontroller and the MATLAB® host computer. The program receives the calculated data and can save it in variables, which then will be plotted on the display. The information provided on the output screen enables the drone pilot to fly under similar circumstances as IFR-pilots. If the drone gets out of sight, the drone pilot still has some information such as:
- Altitude or Height (Depending on altimeter is set to QNH or QFE)
- Attitude
- Speed
- Vertical Speed
- Heading and Track
- Position (either absolute via GPS or in relation to the pilot or departure point)
- Any other information being sent to the host computer
Furthermore, this project could also be the basis for a drone autopilot. Therefore, an interface which can control the drone’s engines and other control devices would be needed.