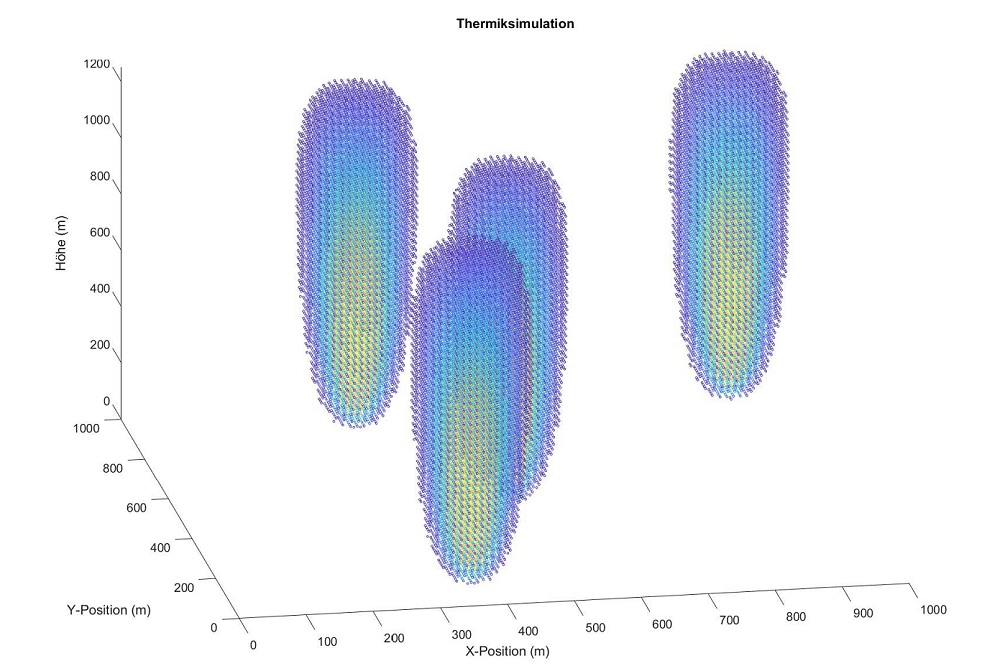
The increased use of unmanned aerial vehicles raises the question of how their range and time of flight can be improved. Raphael Vierhauser and Luis Trojer, two team members who are excellent FPV racers and knowledgeable about drone building, face up to this topic in their bachelor’s thesis. One possibility is the use of thermals. To create the necessary simulation environment for the development of centering algorithms, the air movements found in the atmosphere were incorporated. Statistical values were used to implement an almost realistic simulation in MATLAB®.
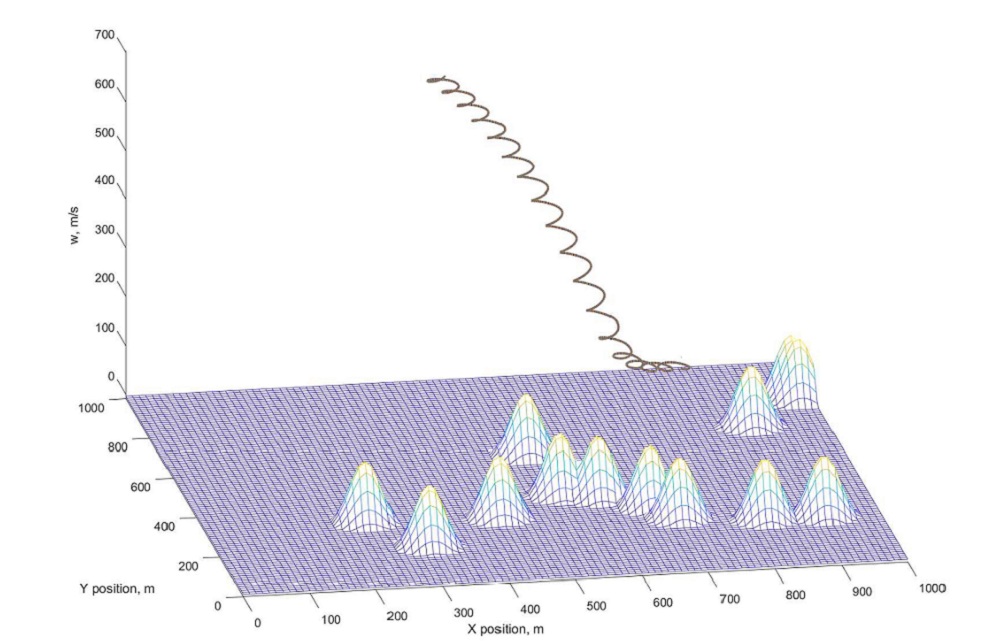
In order to simulate the flight of an unmanned aerial vehicle a simulation of the aircraft was developed using flight mechanics. The developed autopilot for unpowered airplanes controls the unmanned aerial vehicle. This compensates for disturbances and converts the control commands received from the centering algorithms derived in this work into commands to the actuators of the rudders. The centering algorithms must decide whether the vehicle is in a thermal and whether the thermals are strong and wide enough to gain altitude. If a thermal is detected, the program directs the aircraft in circular orbits around the thermal center. The flightpath must be constantly corrected, as the thermal bubbles move relative to the air. With various centering strategies, height gains of several hundred meters can usually be achieved in the simulations.
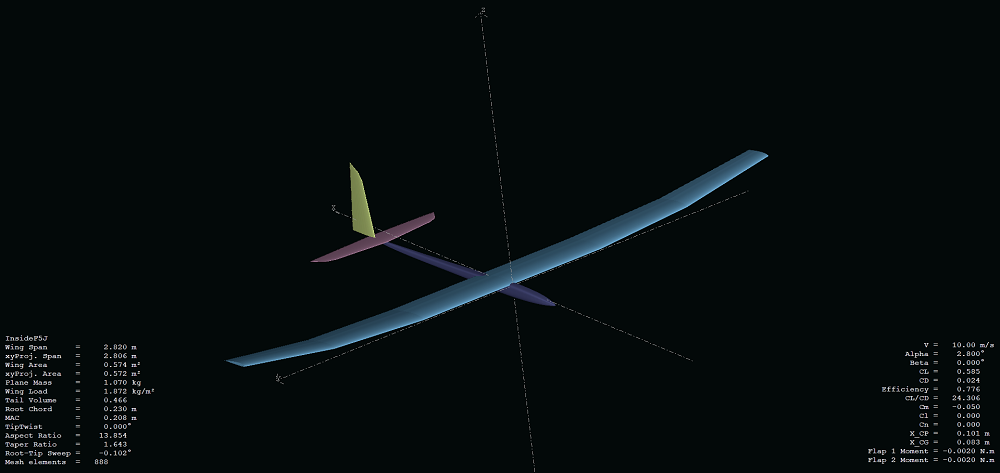
In order to test the algorithm, a test platform is needed: In this case, a model sailplane is being used. To calibrate the autopilot, the aerodynamic and geometric characteristics of the plane have to be determined. This was achieved by simulating the aircraft in XFLR5, a program for analyzing profiles, wings and entire airplanes. The flight controller that is being used is a Teensy 3.2 microcontroller board that runs on Arduino C and can be programmed via the Arduino IDE; it runs the program containing autopilot and centering algorithm, as well as reading data from the sensors and sending PWM (Pulse Width Modulation) signals to the actuators. The sensors used are two pressure sensors to calculate airspeed and angle of attack, a combined accelerometer and gyroscope to determine the attitude of the aircraft and a GPS receiver to get the aircraft´s position.
The testing phase is planned to be during spring. We will keep you up to date and hope to be able to report successful first flights.